IWILDT排爆機器人雙目立體視覺係統設計
作者: / / 閱讀人數:0
獲取空間三維場景的距離信息是計算機視覺研究中最 基礎的內容, 而立體視覺是計算機視覺中測距方法中最重要的距離感知技術, 它直接模擬人類視覺處理景物的方式, 可以在多種條件下靈活的獲取景物的立體信息。雙目立體視覺直接模擬人類雙眼處理景物的方式, 可靠簡便, 在許多領域均極具應用價值, 如微操作係統的位姿檢測與控製、機器人導航與航測、三維測量學及虛擬現實等。

雙目立體視覺是計算機視覺的一個重要分支 , 其思想起源於對人的雙眼視覺的研究, 是指由不同位置的兩台攝像機拍攝同一幅場景, 通過計算空間點在兩幅圖像中的視差, 獲得該點的三維坐標值。若空間一物點在不同方位所投影得兩個該物點的投影圖像坐標, 根據這兩個圖像坐標, 即可以求得該物點的三維坐標。要實現這種坐標變換過程, 必須知道坐標之間的變換關係, 這主要由攝像機內外參數來描述, 確定攝像機內外參數的過程叫做攝像機標定。此外, 還需要得到同一物點在兩幅圖像中的圖像坐標,要根據一物點在一幅圖像中的坐標得到該物點在另外一副圖像中的圖像坐標, 這個過程叫做圖像匹配。一套完整的雙目立體係統可分為以下主要 部分: 圖像獲取、攝像槍定標、特征提取、立體匹配、 深度計算。其中, 攝像機標定與圖像匹配是雙目立體視覺實現過程中的兩個主要步驟。
武漢艾崴基於排爆機器人的應用,詳細描述了排爆機器人雙目立體視覺係統的設計與實現。在攝像機標定中,本係統采用了一種要求低、操作簡便、易實現的張氏平麵法。該係統能實現通過在軟件界麵上的圖像中框取目標物,進而計算目標物三維坐標的功能。最後進行了實際的抓取實驗,取得了良好的實驗效果。
一、雙目立體視覺係統設計
雙目立體視覺( 也稱雙目視覺)是指用兩台性能相同、位置固定的 CCD 攝像槍, 獲取同一景物的兩幅圖像, 根據物體像點的兩個圖像坐標來計算該物體的三維坐標。實現一個雙目立體視覺係統需要完成攝像機標定,三維坐標計算,以及人機接口設計等任務。
1.1 攝像機標定
攝像機標定是建立一個雙目立體視覺中很基礎很關鍵的問題。物體的三維坐標與其二維圖像坐標之間的映射關係由攝像機成像幾何模型所決定,該幾何模型的參數稱為攝像機參數。這些參數必須由試驗和計算決定, 試驗和計算的過程稱為攝像機標定。在本排爆機器人視覺係統中, 采用了張正友的平麵標定方法,它是一種介於傳統的攝像槍標定方法和攝像槍自標定方法之間的一種新的,更靈活的方法,它較傳統的攝像槍標定方法要求低, 操作簡便,又較自標定方法精度高,更具魯棒性。它既避免了傳統方法設備要求高,操作繁瑣等缺點,又較自標定方法精度高,符合辦公、家庭使用的桌麵視覺係統 ( DVS)的標定要求。
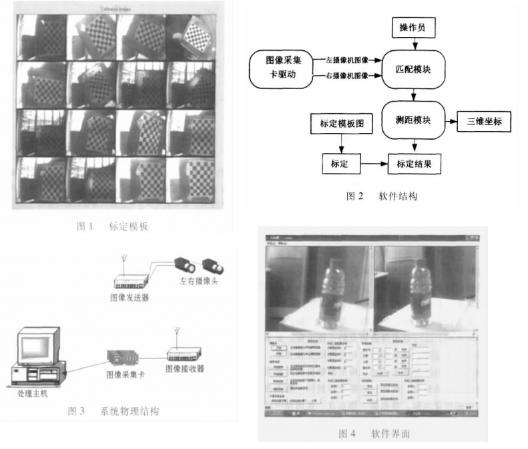
基於 Matlab, 利用多幅模板圖像和張氏平麵法對 視覺係統進行標定,
步驟為: 1) 打印一張模板並貼在一個平麵上;
2) 從不同角度拍攝若幹張模板圖像;
3) 檢測出圖像中的特征點;
4) 求出攝像機的內參數和外參數;
5) 求出畸變係數;
6) 優化求精。
係統標定模板圖如圖 1 所示。
1.2 視覺係統軟件設計
本視覺係統基於VC6.0開發, 利用 MFC 實現用戶界麵, 整個軟件係統完成包括圖像采集卡的訪問,人機接口及圖像顯示, 三維坐標的計算, 以及與 Matlab 交互讀取標定參數等。軟件係統的處理流程如圖2所示。
該視覺係統軟件在功能上包括圖像采集卡驅動模塊, 匹配模塊, 測距模塊。攝像機標定為離線標定, 標定結果以離線方式存儲在計算機文件中。測距模塊用 C++開發, 並封裝成獨立的雙目視覺計算類, 結合離線標定所得到的 攝像機參數,利用雙目視覺的原理實現由兩圖像坐標計算三維坐標的功能。匹配模塊九九视频在线直播免费观看基於圖像采集卡提供的 Evision 軟件實現, 利用灰度區域匹配的原理進行匹配。在圖像采集卡的訪問上九九视频在线直播免费观看則直接利用采集卡所提供的驅動模塊Multicam來實現。該視覺係統軟件的界麵如圖4所示。
2 係統集成
排爆機器人雙目立體視覺係統的主要目標是利用本體上的一對攝像機 L1、L2 獲取物體不同角度的兩副圖像,對兩副圖像進行處理,獲取目標物的三維坐標。
係統在物理上可分為:左、右攝像槍,無線圖像發送接收器, PCI總線圖像采集卡,計算主機,如圖3所示。
本視覺係統的處理流程是: 利用拍攝的多對左、右標定圖, 利用標定模塊對係統進行離線標定,得出立體視覺係統標定參數,以文件形式存儲在計算機中。打開左右攝像頭, 對獲得的左右攝像頭實時圖進行預處理。對預處理後的左右眼圖進行匹配, 由操作員在左眼圖中手動框取目標物, 然後由匹配算法在右眼圖中進匹配。匹配的結果是目標物中心點像素坐標對。在測距模塊中, 利用離線標定得到的立體視覺係統標定參數和匹配模塊得到的目標物中心點像素坐標對, 通過深度計算算法即得到了目標物中心點的三維坐標, 係統軟件界麵如圖4所示。
三、 實驗結果
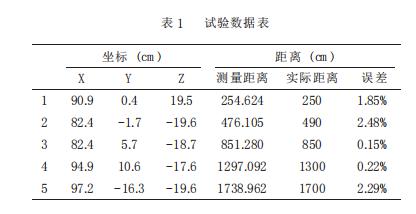
將一目標物置於該排爆機器人雙目視覺係統視覺範圍之內, 然後啟動雙目立體視覺係統。利用本雙目視覺係統軟件, 在軟件界麵中標示出該目標物,然後計算出該目標物的三維坐標,實驗數據如表1所示。實驗表明,該係統可以獲得較高的定位精度。
四、結論
雙目立體視覺直接模擬人類雙眼處理景物的方式,可靠簡便, 在許多領域均極具應用價值, 一套完整的雙目立 體視覺係統可分為以下主要部分: 圖像獲取、攝像槍定標、特征提取、立體匹配、深度計算。其中, 攝像機標定 與圖像匹配是雙目立體視覺實現過程中的兩個主要步驟。九九视频在线直播免费观看提出了一種基於張正友的平麵標定方法的排爆機器人視覺係統設計方法,試驗數據表明, 該係統能獲得良好的定位精度, 提高排爆機器人的性能與易操作性。