展望未來,機器視覺防爆機器人的發展
作者: / / 閱讀人數:0
排爆機器人( EOD robot) 是一種可以遙控操作的地麵移動機器人,一般由一個機械手和一個可移動平台組成,主要用於拆除疑似爆炸物品,以減少作業現場人員傷亡,是目前軍警方麵使用的較先進裝備之一。目前國際上主要流行美國 Remotec 公司的Andros 係列排爆機器人、法國 Cybernetics 公司研製的 TRS200中型排爆機器人等。排爆機器人的排爆工作需要專業的排爆人員操作,排爆人員通過排爆機器人實時傳回的現場圖像進行排爆作業,所以對采集圖像的實時性要求很高。由於排爆機器人一直在運動,操作人員很難不斷調整攝像頭角度來跟蹤目標,於是武漢艾崴研發於最新的計算機視覺技術輔助攝像頭實時跟蹤目標物,從而減輕了操作者的操作難度。
一、整體結構設計
排爆機器人完成工作需要機器人機械平台、硬件控製電路及 PC 端上位機的協同工作, 總體結構示意圖如圖1所示。
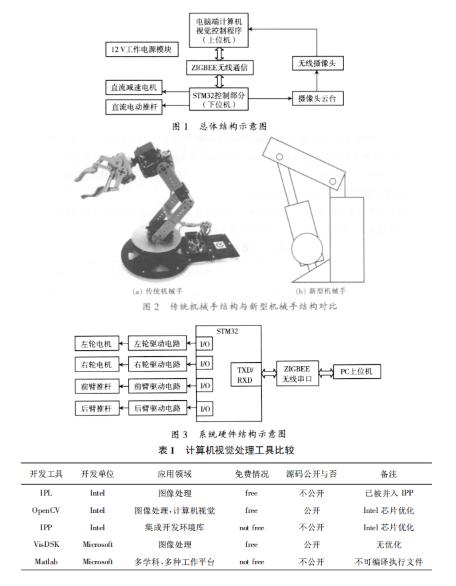
整個平台由 2節12V鋰電池供電,通過操作員在上位機端發送動作指令控製排爆機器人行走或者抓取目標物,無線攝像頭采集的圖像傳至電腦端的上位機,通過視覺算法處理獲得攝像頭雲台的轉動量,從而調整攝像頭采集畫麵的角度,實現目標物的實時跟蹤。
二、 平台結構設計
排爆機器人平台結構可以分為機械手機構、行走機構和攝像頭雲台機構。
2. 1 機械手機構設計
傳統的機械手由底座、手臂、爪子三部分組成. 每個關節之間以電機連接,當電機轉動時帶動手臂的運動。這樣的設計有個缺點,如果主臂上的負載過大,機械手將無法抓取。於是采用新型的設計方案,用直線運動的電動推杆來做主臂的動力。機械結構如圖 2 所示。
2. 2 行走機構設計
為了使排爆機器人能夠到達爆炸物放置地點,它必須有較強的地形適應能力。傳統的輪式底座通過性不強,無法適應複雜地形,所以行走機構采用了適應能力較強的履帶座。
2. 3 攝像頭雲台機構設計
排爆機器人通過攝像頭采集圖像使操作者可以直觀地控製機器人的動作,攝像頭實時傳送給操作者需要的圖像至關重要。於是需要設計一個結構可以使攝像頭做靈活的擺動,從而獲得最佳畫麵。將攝像頭固定在一個擺臂上,擺臂底端固定在一個旋轉的底座上,這樣的設計可以實現 x,y,z 3 個方向的自由轉動,從而捕捉到最佳的畫麵。
三、 硬件電路設計
排爆機器人底座上安裝 2 隻直流減速電機,實現全方位運動,由 2 隻電動推杆中的直流電機提供機械臂的動力。控製這些部件需要一個電機驅動器。排爆機器人的 MCU 采用基於 Cortex - M3 內核的 STM32 芯 片. 該芯片最高主頻可達 72 MHz,可對信息進行快速、及時的處理. 電機驅動芯片采用了 L298N,最高支持20 W 的負載。 無線信息交互采用了基於 ZIGBEE 技術的無線串口,該串口傳輸距離大、能耗低。係統整體結構見圖 3。
四、計算機視覺輔助控製策略
4. 1 OpenCV 簡介
OpenCV 於 1999 年由 Intel 建立,現在由 Willow Garage 提供支持. OpenCV 是一個基於 BSD 許可證授權( 開源) 發行的跨平台計算機視覺庫,可以運行在 Linux、Windows 和 Mac OS 操作係統上。它輕量級而且高效———由一係列C函數和少量C + + 類構成,同時提供了Python、Ruby、MATLAB等語言的接口,實現了圖像處理和計算機視覺方麵的很多通用算法。
OpenCV 主要用於對圖像的一些高級處理,比如特征檢測與追蹤、運動分析、目標分割與識別以及 3D重建等。與其他視覺工具比,OpenCV 的優越性如表1所示。
4. 2 目標跟蹤算法
目標跟蹤是計算機視覺的一個重要分支,該技術在醫療、軍事、教育等領域都有著廣泛的應用。實現目標的關鍵在於完整地分割目標、合理提取特征和準確識別目標,同時還要考慮實現的時間,保證實時性。
在該項目中采用 Garry R. Bradski 提出的 CAMSHIFT( continuously adaptive mean shift) 算法。該算法以顏色的直方圖為目標模式的目標跟蹤算法,即使目標出現變形和部分遮擋也可以應用,而且運算效率很高。
CAMSHIFT 算法簡要流程:
1) 初始化目標模型、候選區域、候選區域中心位置 y0.
① 計算目標區域的 hue 分量圖的直方圖,
cvCalcHist( &hue,hist,0,mask) ;
② 初始化候選區域,y0 即候選區域的中心坐標,
track - window = selection.
2) 根據目標模型的直方圖計算權值,將當前幀轉換為反向投影圖, cvCalcBackProject( &hue,backproject,hist) ;
cvAnd( backproject,mask,backproject,0) ;
3) 計算新的目標候選位置 y0( mean shift 算法)。
① 按式( 2) 計算新的目標位置 y1;
② 令 d = ‖y1 - y0‖,y0 = y1,設 ε 為誤差閾值,N 為最大迭代次數.
如果 d < ε 或者 k≥N,則迭代結束,返回新的目標位置 y0; 否則 k = k + 1,跳到①。
圖 4 是調試 CAMSHIFT 算法識別目標物的截圖。
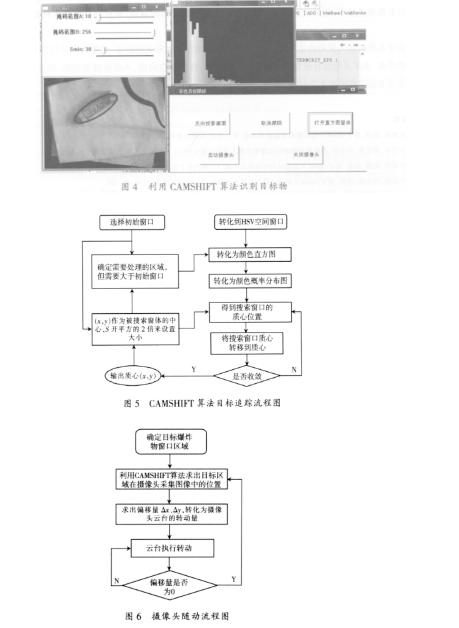
應用 CAMSHIFT 算法前需將爆炸物的圖像由 RGB 顏色空間轉化到 HSV 顏色空間,圖5 為CAMSHIFT算法流程。首先選擇大小為 S 的爆炸物圖像作為初始搜索窗口,然後對該窗口中每個像素點的H通道上采樣,得到色調直方圖; 最後將該直方圖保存下來作為搜索目標的顏色直方圖模型,在目標跟蹤過程中,對攝像頭采集到的圖像的每個像素通過查詢目標顏色直方圖,得到該像素為目標像素的概率。經上述預處理,視頻中每一幀圖像都轉化為目標顏色概率分布圖,也成為目標顏色投影圖。
4. 3 攝像頭隨動設計
當攝像頭采集到目標爆炸物時,操作者在上位機端圈出目標物所在區域作為初始搜索窗口。通過 CAMSHIFT 算法可以得到目標物在攝像頭采集圖像窗口中的位置,從而計算出目標物所在區域離圖像窗口中心點的偏移量 Δx、Δy。將所得的偏移量轉化為攝像頭雲台的轉動量,使雲台跟隨目標物轉動,從而使目標物可以保持在攝像頭采集畫麵窗口的中心位置。
調試過程中出現跟隨不及時現象,經檢驗為主控芯片多任務操作性能不佳。決定采用雙主控芯片方案,由一片單獨的芯片負責攝像頭雲台的隨動動作,檢驗證明隨動性能有明顯提高。圖6為攝像頭隨動流程圖。

這款新型排爆機器人基於創新的機械平台設計,可以輕鬆穿越複雜地形,靈活地抓取重物。應用了最新的計算機視覺技術,經調試證明操作者能及時地得到目標物的畫麵,從而輕鬆地操作機器人進行排爆作業。