武漢艾崴“智能防爆小型機器人”重點專項項目啟動引領創新
作者: / / 閱讀人數:0
隨著機器人在各領域的發展,小型防爆機器人在快速偵測、排除公共場所可疑危險品等優勢逐漸顯現。武漢艾崴對小型防爆機器人的工作原理進行了研究,提出了通過遠程圖傳及無線搖杆控製器,能夠在遠處觀測現場情況,並操作搖杆控製機器人執行動作指令,完成排險和防爆任務的係統設計。係統主要由雙履帶底盤、雙機械臂、雲台、主控模塊和多種輔助傳感器構成。
二十一世紀以來,隨著智能科技在國民經濟各領域的發展,智能機器人的發展也隨之取得了長足進步,智能機器人的應用領域也不斷擴展,人們希望機器人能夠靈活地適應各種工作環境,完成更多複雜任務。可遠程監視及操控的機器人具有優越的機動性和靈活性,在實際中得到了廣泛應用,如公共場所、交通、醫療、軍事等領域。本文涉及的可遠程監
視及操控的移動機器人為保證公共場所安全執行巡邏、排險、防爆等任務,具有重要的社會作用。
一、小型防爆機器人係統整體設計
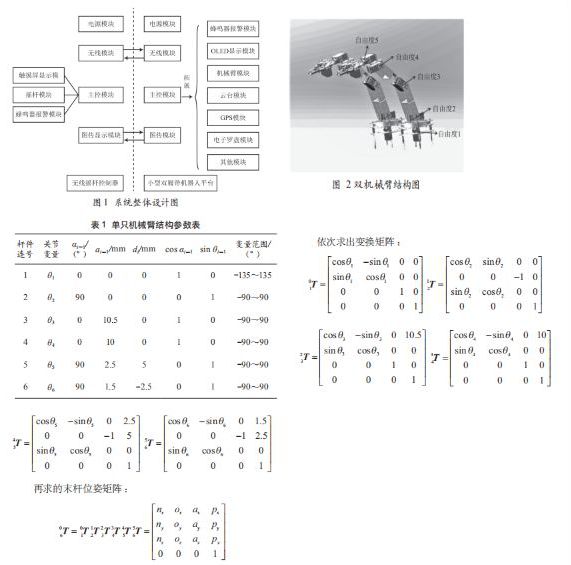
係統整體設計如圖 1 所示。
二、雙履帶底盤設計
考慮到小型防爆機器人所麵臨的排爆環境因素較為複雜,因而對移動平台有多方麵的要求,包括越障能力、地形適應能力、轉彎效率、載重能力等。對比常用的三種底盤,輪式底盤、履帶底盤和腿式底盤,綜合三者的優缺點和對公共場所的適應性,本係統選擇雙履帶式底盤。
由於本係統使用的模塊較多,質量較重,因此底盤的剛性要強,否則易造成車輛變形,影響機器人行走。因而雙履帶式底座在整體結構上采用仿坦克型,材料上兼顧機器人的輕便性,與電機固定的底板承受著整個機器人的重量,材質為不鏽鋼,上部的蓋板主要承受機械臂和雲台的重量,材質為8 mm 厚的亞克力板。
三、雙機械臂設計
3.1 雙機械臂機構
機械臂是小型防爆機器人的重要外設,承擔著抓取、搬 運、放下等動作任務。因而要求機械臂具有機構比例適當、可活動的關節和可靠的抓取裝置。對比單隻機械手和多隻機械手的優缺點,雖然多隻機械手在機構上更加複雜、控製更加困難,但多隻機械手可協同作業使操作性更加靈活,操作空間範圍更廣,更符合執行多樣性任務的小型防爆機器人的要求。同時自由度對機械臂的動作執行效果影響較大,自由度較少時,機械臂能夠執行的動作較少、靈活性差,但其結構簡單,可靠性強;自由度較多時,機械臂能夠執行的動作較多,靈活性好,但其結構複雜,可靠性差。
本係統采用兩個自由度為 5 的機械臂,並各配有一個機械爪,整體較靈活,如圖 2 所示。
其中雙機械臂中主要使用了數字舵機作為動力來源。數字舵機在體積和質量上優於步進電機,更適合小型機械裝置,隻需 PWM 信號就可完成精確控製。同時為了減輕機械臂的重量,關節連接件均選用鋁材料。
3.2 雙機械臂的控製
為提高係統指令的響應速度和使機械臂模塊化,運用舵機控製板控製機械臂上的數字舵機,分擔主控 STM32 處理器的處理的數據量。舵機控製板以微型控製器 STM32F03VET6
為核心,通過 USART與主控板通信,輸出 PWM 信號給數字舵機,最多可同時控製 24 個數字舵機。
3.3 雙機械臂性運動學分析
機器人操作手通常為開鏈空間連杆機構,各杆件間通常由轉動副和移動副相連接。開鏈一段安裝在基座上,另一端為末端執行器。各關節由驅動器驅動,關節的相對運動引起連杆的運動,進而確定末端執行器在空間的位置和姿態。齊次坐標和齊次變換是解決機器人操作手運動學的常用數學工具 。
采用齊次坐標和齊次變換分析,首先列出單隻機械臂結構參數表,見表 1 所列。
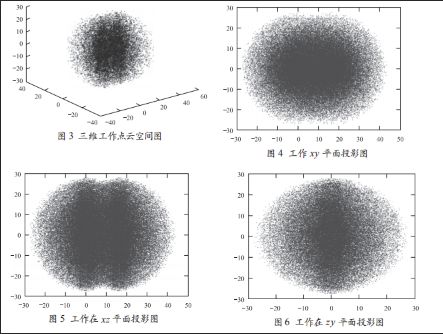
運用 Matlab 軟件,將表 1中的數據帶入程序中,可得雙機械臂的工作空間。兩個單獨機械臂工作空間重疊部分,為雙機械臂的協作空間。雲空間及投影如圖 3-圖 6 所示。
四、 雲台及圖傳設計
雲台及圖傳如同小型防爆機器人的眼睛,需采集現場畫麵信息並通過無線傳輸給操作人員,因此雲台結構以能夠提供更多視覺角度為設計原則。
雲台模塊由三個數字舵機和直流推杆組成,並配有舵機控製板,使用統一的串口通信格式與主控模塊通信,從而控製雲台。雲台的直流推杆可調節雲台的高度,使得小型防爆機器人能從較高處采集視覺信息,避免因高大的障礙物遮擋而無法觀測。雲台的最頂端配有圖傳模塊和燈光補償裝置,使機器人可在不同環境下從更多角度采集視頻信息。
圖傳模塊由攝像機、圖傳發射機和視頻接收器組成。攝像機輸出 AV 信號給圖傳發射機,圖傳發射機通過無線傳輸給視頻接收機,視頻接收機接收數據並解析,從而完成圖像傳輸。攝像機選用的是具有 F2.8 光圈和 155°超廣角小蟻運動攝像機,能夠提供更優質的圖像信息。圖傳發射機選用奧姆威5.8 G 圖傳發射機,發射頻率為 5.8 GHz,四級可調功率,具 有 40 個可調頻道。視頻接收器選用 7 寸內置 5.8 雙路接收一體機顯示器,分辨率為 800×480。
燈光補償裝置選用四個功率為 2 W 的高亮 LED 燈組成的LED 燈模塊。主控模塊可以輸出的控製信號通過 L298N 驅動電路,來控製LED 燈的開關,為小型防爆機器人提供燈光補償。
五、 主控模塊與輔助傳感器
機器人主控模塊采用微型控製器 STM32F03 ZET6。STM32 係列微控製器是由意法半導體公司以 ARM Cortex-M3為內核開發生產的 32 位微控製器,專為高性能、低成本的嵌入式應用設計。STM32F03ZET6 為“增強型”係列,最高工作頻率為 72 MHz,內置高速存儲器(最高可達 512 kB 的閃存和 64 kB 的 SRAM),擁有豐富的外設資源,12 通道的 DMA
控製器、16 通道的 A/D 轉換器、最高達 112 個快速 I/O 口 (I/O 口翻轉速度可達 18 MHz)和 11 個定時器等,還具有多個通信接口方便與外接模塊通信 [6]。開發人員可在 Keil 軟件上編譯好程序,通過下載器下載到芯片中,完成在線調試。
主控模塊通過通信指令控製輔助傳感器采集和發送數據,從而使小型防爆機器人能夠完成周圍環境信息采集,接受數據並將信息回傳搖杆控製器。主要的輔助傳感器包括無線通信模塊、GPS 模塊和電子羅盤模塊。
GPS 的作用在於能夠獲取小型防爆機器人的室外定位信息,操作人員能實時了解小型防爆機器人所處的位置。GPS模塊使用 U-BLOX 公司生產的以 NEO-7N 為內核的衛星定位器,最高定位精度為 2.5 m。模塊上搭載微處理器,可解析GPS 模塊中的原始數據,並通過串口將定位信息傳到主控模塊。
電子羅盤模塊采用體積小、功耗小的 AHRS 模塊 GY953,將得到的三軸陀螺儀、三軸加速度計和三軸磁力計的數據利用四元數進行互補融合,解算出姿態角 [7],從而得到小型防爆機器人姿態數據。其中的融合算法運算量較大,占用的 CPU資源較多,因而由配有的微處理器處理,將數據結果通過串口傳回主控模塊。使用額外處理器能夠大大節省主控模塊的CPU 資源,從而加快整個係統的響應速度。
無線通信模塊采用的是 SX1278/76 射頻模塊,通信方式為 USART 串行接口。 射頻模塊功率為 1 W(30 dBm),SX1278/SX1276 芯片方案采用先進的 LoRa 擴頻技術,通信距離為 8 000 m,抗幹擾能力強。在地域複雜的情況下,保證通過搖杆控製器能對小型防爆機器人平台進行有效控製。
串口通信是一種常見的數據通信方式。串口通信按位發送和接收字節,僅使用 3 條線 TX,RX 和地線,並在微處理器中進行簡單的初始化配置,就可完成數據傳輸。本係統中無線通信模塊與主控模塊之間的串口通信,采用的是半雙工單線通信方式,波特率為9600 b/s。
六、軟件設計
小型防爆機器人平台的程序流程如圖7所示。係統通電後,各模塊初始化。若有模塊初始化不成功,蜂鳴器響起,提示操作人員。各模塊初始化後,係統進入循環,依次讀取通信模塊的數據、模塊數據,對通信數據包進行解析,判斷通信數據包是否正確。若數據正確,刷新所顯示的通信數據,否 則 LED 閃爍,重新讀取數據。當通信數據正確,將它模塊數據比較,確定係統是否可執行,防止操作人員誤操作,保證係統的可靠性。若可操作,則執行並讀取執行指令後的模塊數據,再發送模塊數據,否則直接發送模塊數據,進入下一個循環。
搖杆控製器的程序流程如圖 8 所示。係統通電後,各模塊初始化,判斷各模塊初始化是否成功,若初始化成功,則進入循環,否則蜂鳴器響起,提醒操作人員。依次讀取遙感數據、編碼遙感數據、發送遙感數據,刷新所顯示的遙感數據。再讀取通信模塊數據,判斷通信模塊數據是否正確,若數據正確,則刷新所顯示的通信模塊數據進入下一個循環,否則LED 閃爍,重新開始讀取數據。
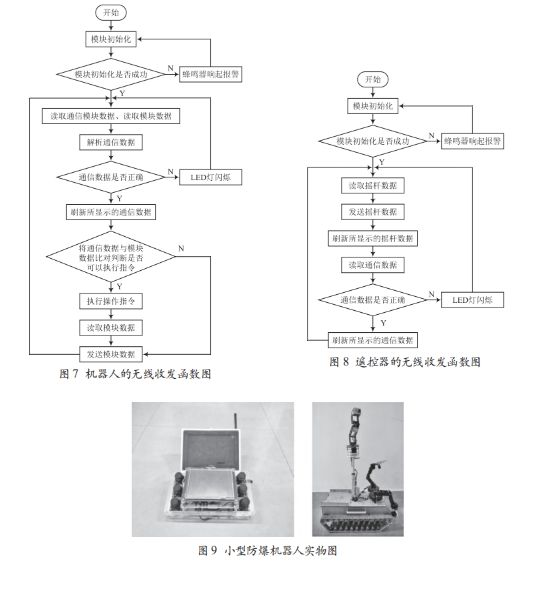
通過對小型防爆機器人機械結構、控製係統的軟硬件設計,製作出一台可通過遠程圖傳及無線搖杆進行控製的小型防爆機器人,如圖 9 所示。通過屏幕觀測遠處的現場情況,操作搖杆控製機器人完成各種動作,實現在公共場所活動中,幫助安保人員執行巡邏、排險、防爆等任務,具有廣範的應用價值和前景。
