武漢艾崴排爆機器人的設計與研究
作者: / / 閱讀人數:0
當前世界恐怖事件時有發生,社會影響特別惡劣,研製滿足實戰化需要的反恐排爆設備顯得極為迫切,世界各國尤其是發達國家都特別重視對反恐排爆機器人的研究。自動型排爆機器人能分辨出什麽事可疑物品或危險物品,及時排除險情,但成本較高,一般在狠危急的時候才用。目前使用的防爆機器人,一般價格昂貴,設計筆記複雜,不利於推廣應用。武漢艾崴研製了一種遠程操作型機器人,體積小,重量輕,在可視條件下進行人為排爆,成本低廉,具有較高的應用價值。該排爆機器人的底盤下有四個輪子負責前景和轉向(也可以設計成軌道形式)。通過遙控,該機器人可以進行伸縮、彎曲和轉動,最終完成抓取工作,滿足排爆工藝要求。
一、機器人的機構設計
總體設計
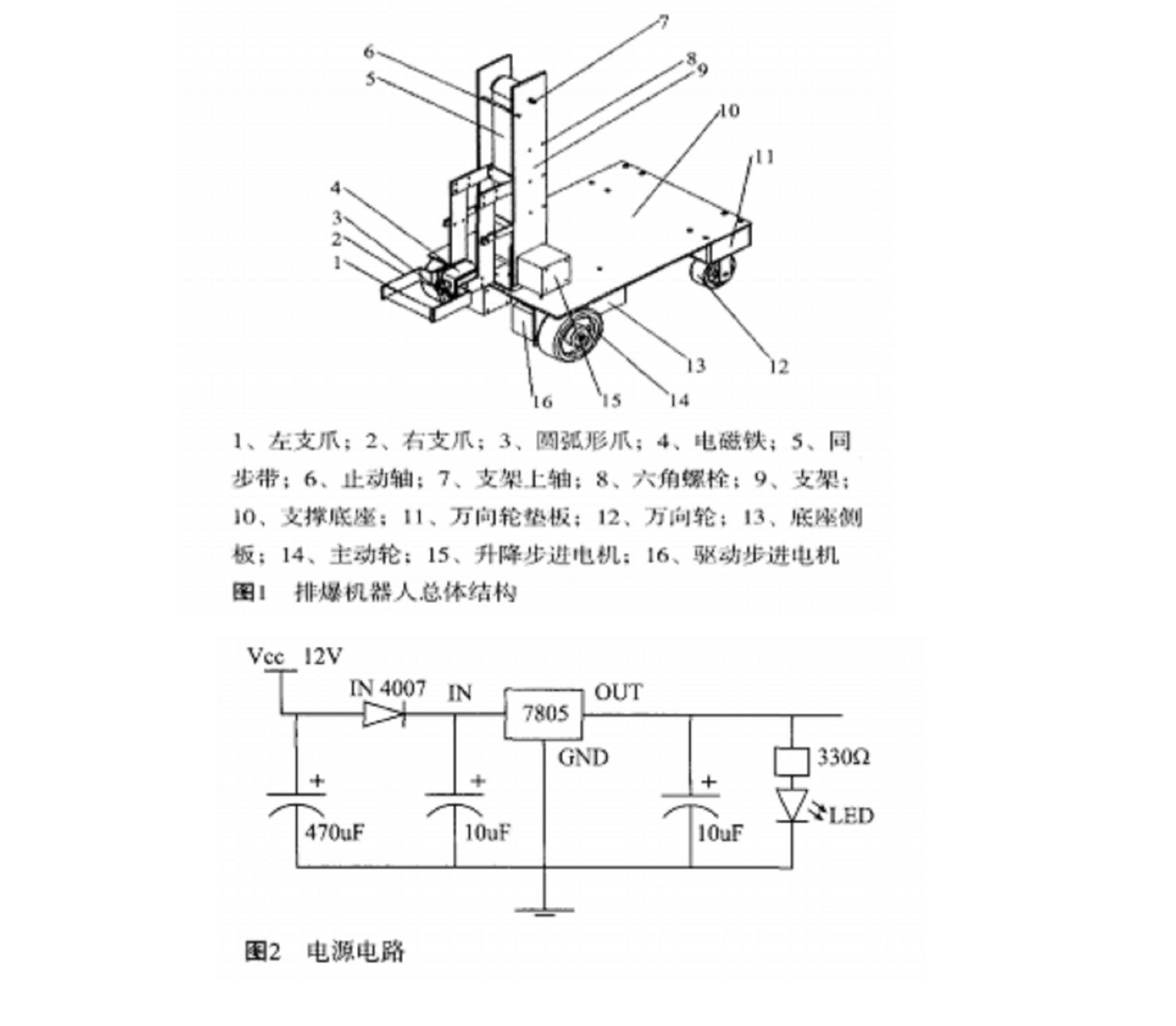
該排爆機器人是依靠控製電磁鐵的通斷電來實現抓取和放下物品。在帶磁鐵通電後,電磁上鏈接弧形爪,依靠弧形爪抓取物品。為了防止執行裝置超出行程,在豎直的支撐架上端安裝一個行程止動軸。
傳動裝置的動作方式是依靠步進電機控製的同步帶來實現對執行部件的豎直升降的,需要準確的定位支爪,因此采用步進電機控製同步帶來達到上下位置的精確定位,且同步帶有兩塊硬鋁板材來支撐,這樣就既可保證強度又能減輕重量。
由於九九视频在线直播免费观看設計的機構不僅需要運動靈活,而且需要搬運物品,因此機器人主題結構大部分選用硬鋁板材,總體結構如圖1所示。
驅動電機的選擇
該機器的運行是依靠驅動輪的運動來實現的,為了保證控製抓取和放下工件的力度和精度,必須要求它有較高運動精確且便於遙控,所以選用兩個步進電機作為驅動電機,並且兩個前輪為驅動輪。
二、控製係統設計
硬件係統設計
電源電路的設計
由於機器人行走、抓取等動作需要較大功率,一般電池不能滿足其需要,所以選用了雙輸出大功率交流整直流電源輸出電壓分別為24V、12V,額定電流分別為3A、2A。
考慮到AT89C52芯片要求的供電電壓一般在5V,則電源電路需設計成5V的穩壓,可以將輸出電壓穩定在5V。其電源電路設計如圖2所示。
步進電機驅動電路設計
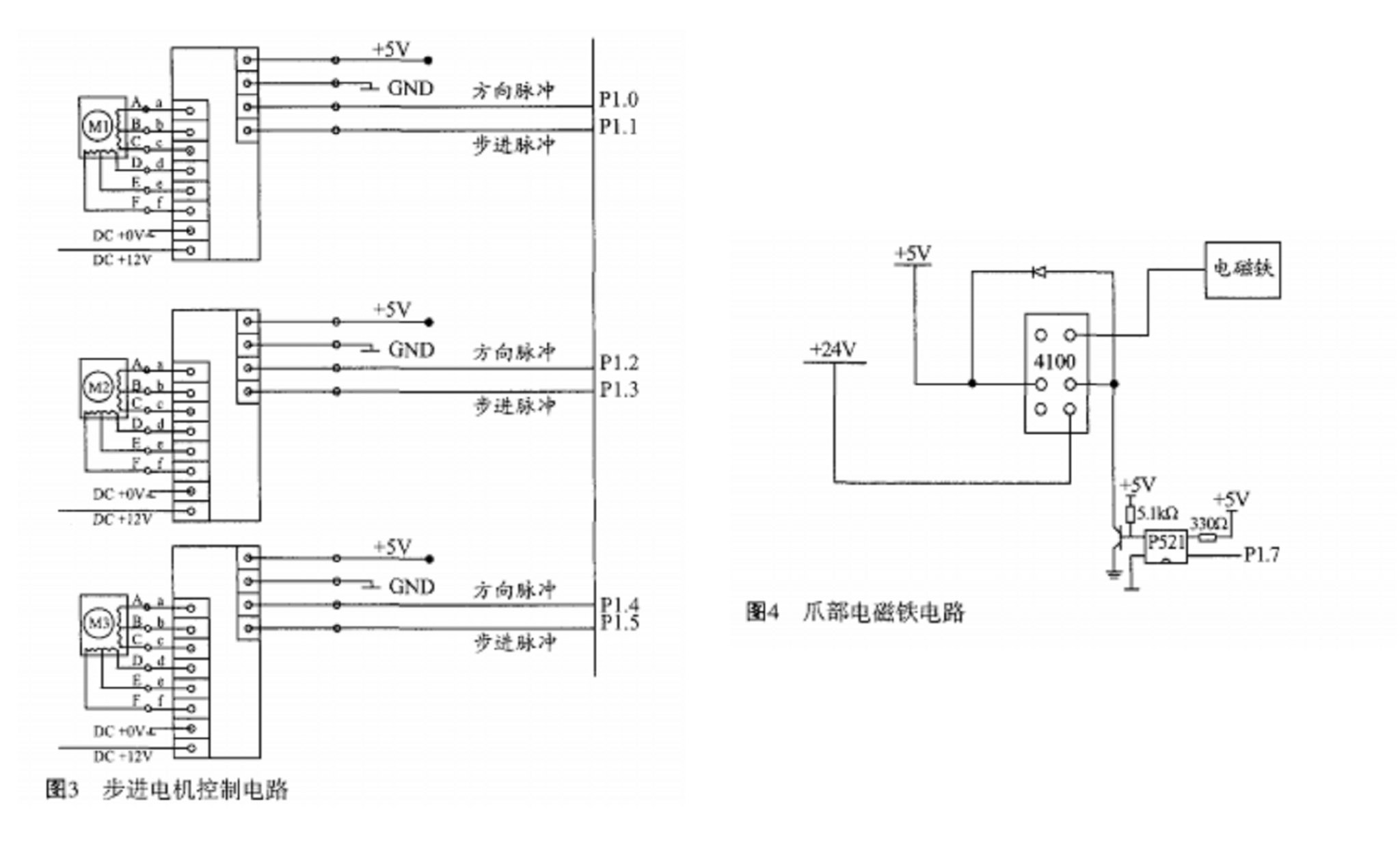
機器人的前進、後退、轉向以及爪的升降都有步進電機來控製。步進電機有驅動器驅動,其驅動電壓為12V。驅動器本身所需電壓5V,驅動器的步進脈衝由單片機提供。本設計的控製電路如圖3所示。
爪部電磁鐵電路設計
電磁鐵用來抓取重物,它的開合由繼電器控製,繼電器型號為4100,工作所需電壓為5V,由於繼電器為電感性圈所以並上一隻繼流二極管。為了不使繼電器對單片機造成衝擊,在三級管與單片機直接加光隔P521。電磁鐵工作電壓為24V。九九视频在线直播免费观看設計的控製電路如圖4所示。
遙控接受器與單片機的連接電路設計
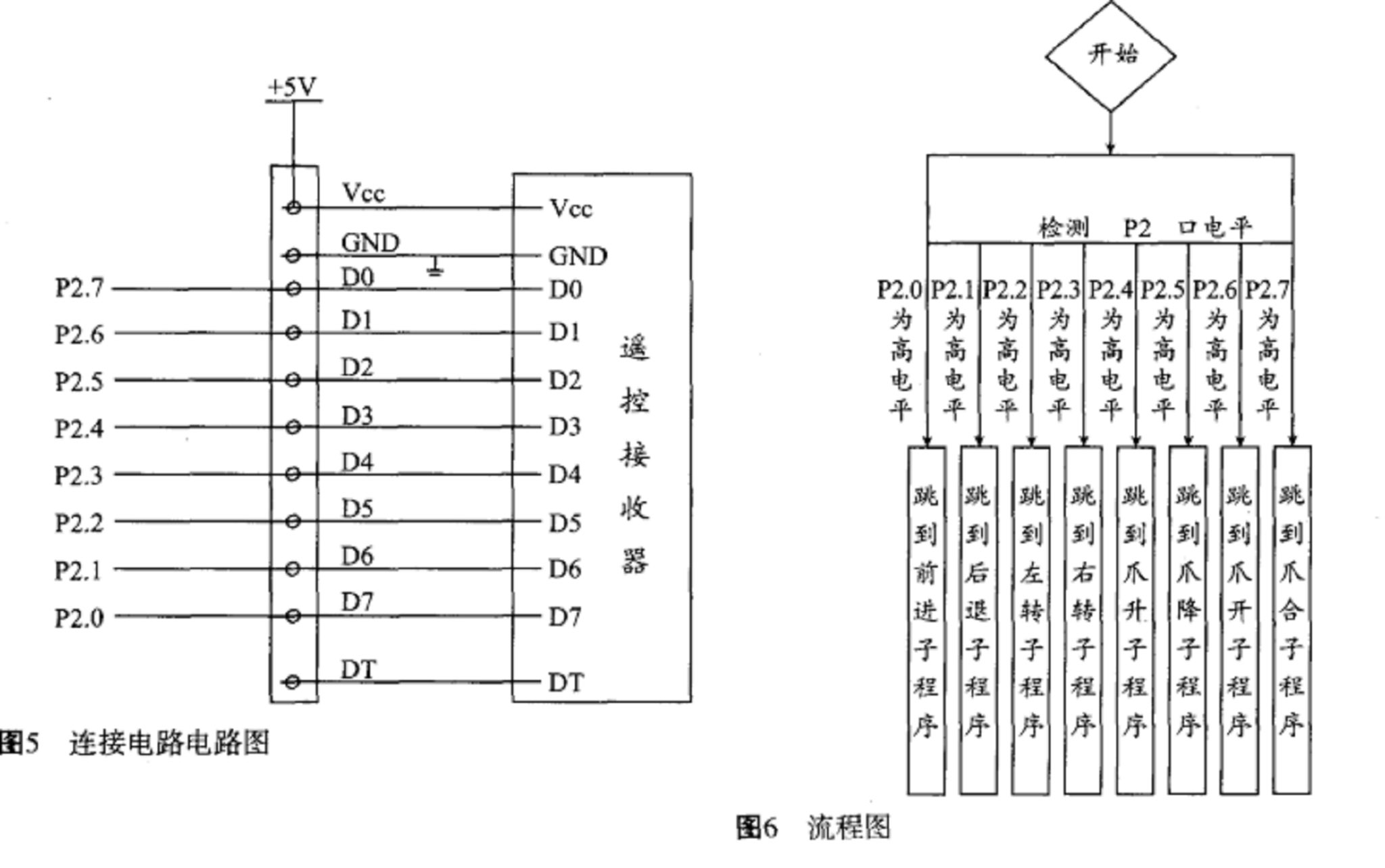
遙控接收器本身需要 5V電壓,它的 DO~D7引腳與單片機的 P2.0一P2.7引腳對應相連 ,當搖控器發送端某一按鍵按下時與之對應的接收器上的引腳就為高電平,單片機上對應引腳也為高電平。其電路圖5所示。
軟件係統設計
排爆機器人要實現的動作分別為機身前進 、後退 、左轉 、右轉 ,爪的上升 、下降 、爪開、爪合。 這八個動作對應八個子程序。主程序為檢測 P2口各引腳電平,檢測到某一引腳為高電平則跳到對應子程序。流程圖如圖6所示 。
信號采集處理的主要功能是將遙控接受器的高 低 電平信號變化經 I/0口輸入單片機 ,再由單片機做出相應的反應,實現排爆機器人的各個動作。
該機器人結構新穎,已獲得國家發明專利,而且價格低廉,便於推廣應用。使用該排爆機器人,排爆人員可在遠距離對機器人進行精確遙控,完成抓取爆炸物並將運至安全地帶。該機器人既可以在開闊地帶工作,也可以在建築物內工作,或在狹小的隧道空間工作。